Argus: The 20-Legged Sea-Urchin Robot That Challenges How Machines Should Move
A robot does not need a face to know where it is going. It may not even need a front.
That is the radical lesson emerging from Argus, a new 20-legged robot developed at Duke University and published in Science Robotics. At first glance, Argus looks less like the humanoids, robot dogs and wheeled machines that dominate the public imagination, and more like a mechanical sea urchin: a compact central body surrounded by telescoping limbs, each one ending in a depth-sensing camera.
But Argus is not strange for the sake of being strange. Its form reflects a deeper design argument. Instead of asking how to make a robot resemble an animal, Duke’s General Robotics Lab asked a more fundamental question: what body would let a machine act equally well in every direction?
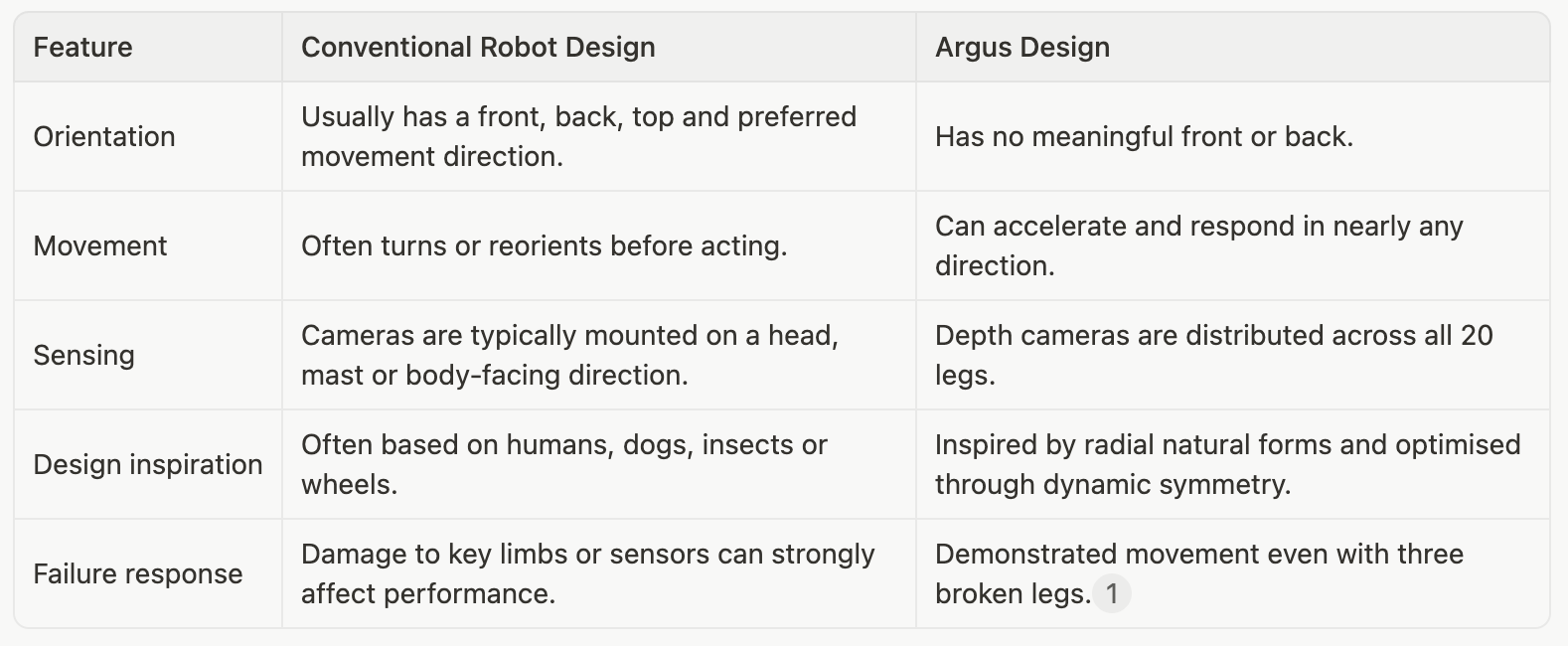
The result is a robot with no fixed front, no fixed back and no preferred direction of motion. Its 20 modular legs radiate from the central core and are arranged at the vertices of a regular dodecahedron, a geometric form with 12 pentagonal faces. This gives Argus not only unusual movement, but also unusual perception: each leg carries a depth camera, giving the robot a distributed, whole-body view of its surroundings.
“Watching Argus move is unlike watching any other robot we’ve worked with,” said Jiaxun Liu, co-first author and Ph.D. student in Duke’s General Robotics Lab. “The first time we saw it navigate among trees and rough terrain, even under heavy collisions, we knew this was something different.”
The Principle Behind Argus: Dynamic Symmetry
The Duke team describes the idea behind Argus as dynamic symmetry, formalised through a measure called dynamic isotropy. In simple terms, dynamic isotropy asks how uniformly a robot can accelerate its centre of mass in every direction. A score of 1 would represent an idealised machine that can act with perfect uniformity, regardless of orientation.
Many advanced quadrupeds, humanoids and conventional drones score below 0.6 on this measure, according to Duke. Argus scores 0.91, placing it close to the theoretical maximum and making it a powerful proof of concept for a different way of designing robots.
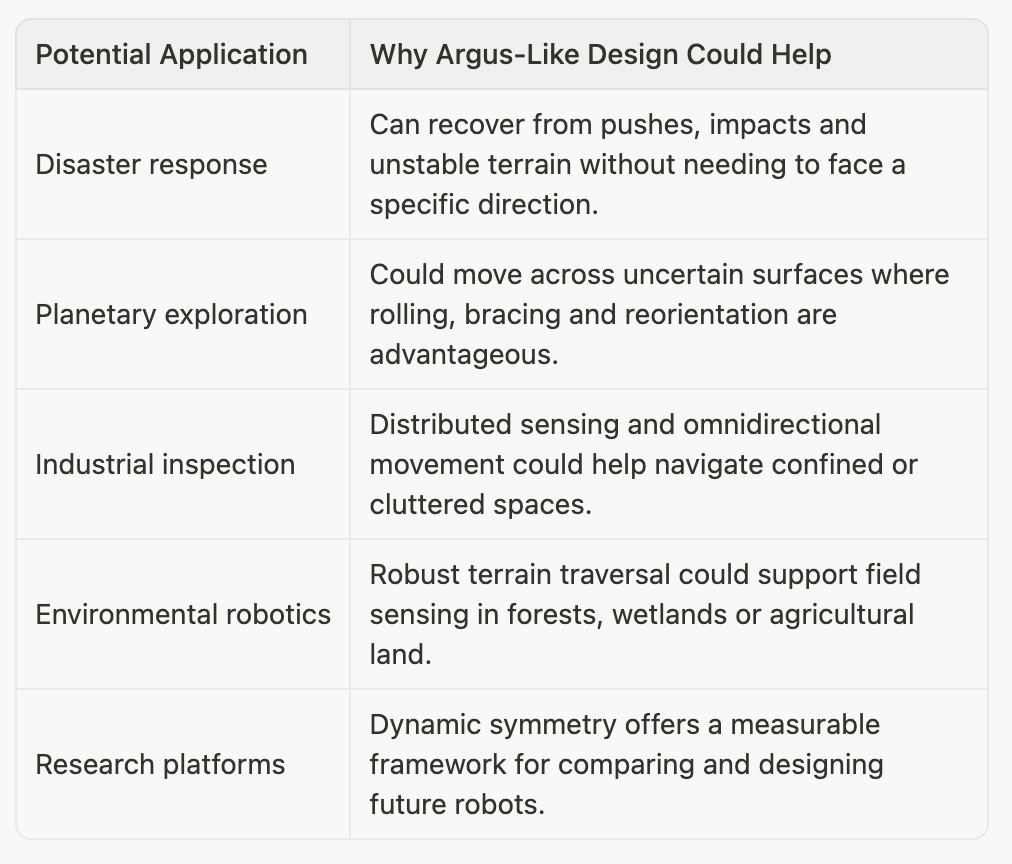
This shift matters because robots increasingly need to operate outside controlled environments. A robot in a forest, mine, disaster zone, farm or extraterrestrial landscape may not have the luxury of turning around, standing upright or choosing a perfect approach angle. It may be pushed, blocked, damaged or forced to move through terrain where any side could become the leading side.
Argus treats this uncertainty not as an exception, but as the design condition.
What Argus Can Do
The robot’s physical demonstrations are striking. Duke reports that Argus has rolled across concrete, grass, dense foliage, soft sand, wet surfaces and bark, including obstacles up to five inches tall. It can self-stabilise quickly after being pushed, continue moving after partial leg damage, carry a 10-pound payload at nearly full speed, climb between parallel vertical walls, and track and push a three-foot cube while continuously rolling.
Its sea-urchin-like body gives it two complementary forms of resilience. The first is locomotor resilience: if the robot is knocked, rotated or blocked, it can use another subset of limbs to continue moving. The second is perceptual resilience: because cameras are distributed around the body, perception is not tied to a single head or forward-facing sensor.
That combination is what makes Argus feel like more than a novelty. It is not simply a many-legged robot. It is an experiment in whole-body actuation and whole-body perception.
Why the Sea Urchin Matters
Argus is often described as sea-urchin-inspired, and the resemblance is easy to see. Sea urchins are radially organised animals that interact with the world through distributed structures rather than a single forward-facing body plan. In Argus, that biological intuition becomes an engineering principle: distribute action and perception across the body so the machine is not dependent on one privileged direction.
The important point is that Argus is not merely copying a sea urchin’s appearance. It is learning from a deeper biological idea: survival in complex environments often comes from distributed capability rather than centralised elegance. Nature repeatedly uses radial forms, redundancy and localised contact to create robust organisms. Argus translates that logic into robotics through mathematics, simulation and hardware.
This is where the robot becomes especially relevant to biomimetic engineering. The future of nature-inspired machines should not be limited to making robots that look like animals. The wiser path is to ask what living systems reveal about constraints, resilience and action. Argus does exactly that.
A Robot Designed by Search, Not Assumption
One of the most important details in the Duke work is that Argus was not simply sketched into existence. The team simulated more than 1,500 robot configurations to search for designs approaching the theoretical limit of dynamic symmetry. The Science Robotics abstract states that, across more than 1,000 simulated morphologies, higher dynamic symmetry consistently improved trajectory tracking, task success, robustness, resiliency and energy efficiency.
This suggests a broader design method. Rather than beginning with a familiar body plan and trying to improve it, roboticists can begin with a desired capability and search the space of possible bodies. In other words, Argus is not only a robot. It is evidence for a new design philosophy.
“When a robot can accelerate equally well in every direction, it stops needing to face the world in any particular way,” said Boyuan Chen, director of Duke’s General Robotics Lab. “Forward and backward become the same. Left and right become the same. The whole problem of robot control changes character.”
Why This Matters for the Future of Robotics
Most public attention in robotics currently flows toward humanoids. That is understandable: humanoids fit naturally into human-designed spaces, and they are easy to imagine as general-purpose labour machines. But Argus points toward a different future, one in which robots are not judged by how closely they resemble us, but by how intelligently their bodies match their environments.
A humanoid may be useful in a warehouse aisle or a household kitchen. A quadruped may be useful on stairs and rough terrain. But a direction-agnostic robot could be valuable in settings where orientation is constantly disrupted: collapsed buildings, forest floors, planetary caves, industrial inspection sites, pipes, trenches, steep surfaces and low-gravity environments.
Argus also challenges a cultural assumption. The most useful robots of the future may not look human, friendly or familiar. They may look alien because the physical world itself is not designed around our expectations. In demanding environments, usefulness may come from geometry, redundancy and embodied intelligence rather than anthropomorphic appeal.
The Necessary Caution
Argus is still a research platform, not a finished commercial machine. Reports note that the robot’s real-world object-tracking and pushing tests did not always match simulation performance, partly because its time-of-flight cameras could overheat and become desynchronised during repeated trials. Its complexity is also obvious: 20 legs mean more actuators, more control demands, more weight and more potential failure points.
That does not weaken the achievement. It clarifies it. Argus should be understood as an existence proof: a working demonstration that dynamic symmetry can produce a robot with capabilities that conventional body plans may struggle to match.
“Argus is an existence proof,” said Boxi Xia, co-first author and postdoctoral researcher at Duke’s General Robotics Lab. “It shows that designing for dynamic symmetry isn’t just a theoretical curiosity. It produces a robot you can deploy in the wild, on uneven ground and in clutter, even in low-gravity settings. It changes what’s possible.”
The Larger Lesson
Argus belongs to an important lineage of bio-inspired engineering, but its deeper contribution is philosophical. It reminds us that nature does not build one universal body plan. It builds forms that answer ecological questions. Sea urchins, starfish, insects, birds, mammals and microbes all reveal different ways of sensing, moving, adapting and surviving.
The next generation of robotics may therefore depend less on asking, “Can we build a robot like us?” and more on asking, “What kind of body does this world require?”
Argus answers with a sphere of telescoping legs and 20 eyes. It is awkward, elegant, strange and deeply instructive. It suggests that the future of robotics may not be humanoid at all. It may be radial, distributed, resilient and inspired by forms of life we have barely begun to understand.
References
[2] Science Robotics — Extreme dynamic symmetry enables omnidirectional and multifunctional robots
[3] EurekAlert — Omnidirectional, sea-urchin-like robot defies traditional designs